Robotique, des débuts
Publié le
Il y a moult années, mon père m'avait emmené voir un concours de robots. Dans ce concours, des machines autonomes étaient placées au centre d'un labyrinthe et devait en sortir. Moi, j'étais pour celui à la coque en Lego, car j'aime bien les Lego. Je me souviens aussi d'un des robots que avait commencé à passer par dessus un mur.
Bref, c'est un souvenir qui fait parti de ses souvenirs tenaces et marquants. Et pourtant, je n'ai jamais fait de robotique depuis. Je me suis dirigé vers l'informatique et à part quelques montage de LEDs sur le port série d'un Vic 20, je suis resté dans le domaine du mouvement virtuel.
Et puis, une génération passant, mon fils s'est intéressé aux robots. Captivé par les différentes formes de ces machines, du bras articulé jusqu'aux Nao et Asimo. Jusqu'à me poser la question fatale : dit Papa, si on construisait un robot ?
Oui... là comme ça, sur le pouce. Mes connaissances en électronique datent un peu et je m'aperçois que je ne sais plus calculer une résistance équivalente à deux résistances en parallèle. Et même temps, ça fait quelques temps que je me dis que je bidouillerais bien quelque chose autour de l'Arduino.
Sur le Vic 20, j'avais une peur bleue de griller par inadvertance mon port d’extension. C'était mon seul ordinateur. 30 ans plus tard, il y a plus de puissance dans un petit machin à 19€ que dans le Vic 20, plus de documentation accessible, et malgré mes lacunes en électroniques, je pense que c'est jouable.

Donc c'est parti.
Il a fallu commencer à expliquer qu'on n'allait pas partir tout de suite sur un clone d'Asimo, que pour aller loin, il faut commencer par le début de la route. Je me suis donc équipé en composants, plaque d'essai, câbles, documentation et voilà le projet démarré.
Comme l'alimentation autonome de la future machine est encore hors de ma portée, je commence par revoir les bases et j'invite les deux enfants à faire des expériences électroniques, puis à monter un chassis.
Nous en sommes là. Je sais à nouveau allumer une LED sans la griller, récupérer une mesure de tension, faire du bruit avec un buzzer,... Le fait de passer par un micro-contrôleur, c'est à dire dans mon domaine, aide pas mal.
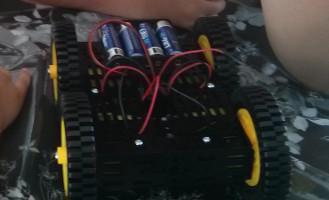
Le châssis et ses moteurs avec boite de réduction sont montées.
Prochaine étape, l'alimentation autonome. Papa (le mien) est venu à l'aide sur cette partie. J'attends les pièces et j'espère voir rouler le robot très bientôt.
Suite au prochain épisode.